

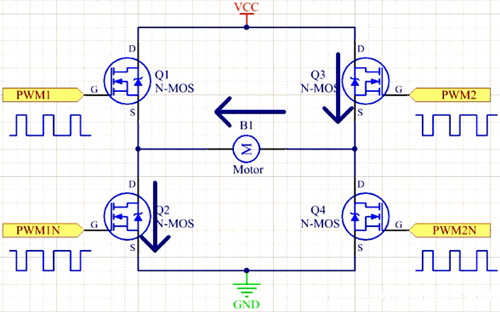
根據對橋臂上MOS的PWM控制方式不同,分為三種控制模式:受限單極模式、單極模式、雙極模式。
受限單極模式
電機電樞驅動電壓極性是單一的。需要對一個MOS控制PWM控制。
優點:控制方式簡單。
缺點:不能剎車,不能能耗制動,在負載超過設定速度時不能提供反向力矩。調速靜差大,調速性能很差,穩定性也不好。
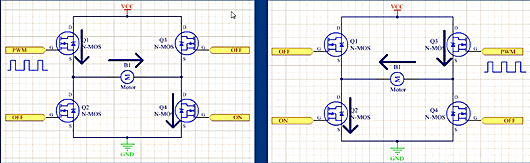
單極模式
電機電樞驅動電壓極性是單一的。需要對同一側橋臂的兩個MOS管進行互補PWM控制。要使用高級定時器的互補通道進行控制。
優點:啟動快,能加速,剎車,能耗制動,能量反饋,調速性能不如雙極模式好,但是相差不多,電機特性也比較好。在負載超速時也能提供反向力矩。
缺點:剎車時,不能減速到0,速度接近0時沒有制動力。不能突然倒轉。動態性能不好,調速靜差稍大。
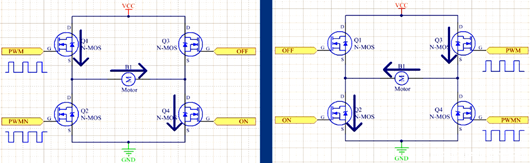
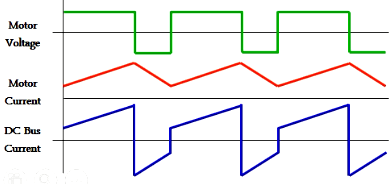
控制過程:MOS管1和2由一對互補PWM進行控制,當1為高電平時,由VCC-1-Motor-4-GND形成通路,電機電流上升。當1為低電平時,2變為高電平,根據楞次定律,當不再給電機供電,線圈中存在自感電動勢,電流繼續往同一方向流動,于是由2-Motor-4形成通路,給線圈電流繼續提供通路。
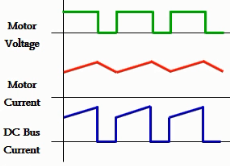
于是線圈中的電流波形:
雙極模式
電樞電壓極性是正負交替的。需要兩組互補PWM同時對4個MOS管進行控制。
優點:能正反轉運行,啟動快,調速精度高,動態性能好,調速靜差小,調速范圍大,能加速,減速,剎車,倒轉,能在負載超過設定速度時提供反向力矩,能克服電機軸承的靜態摩擦力,產生非常低的轉速。
缺點:控制電機復雜,在工作期間,4個MOS管都處于開關狀態,功耗大。
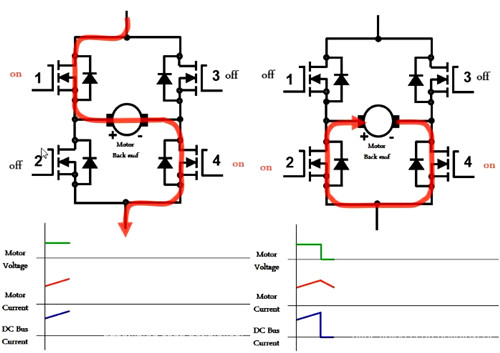
控制過程:1和4同時處于PWM的高電平,于是由VCC-1-Motor-4-GND形成通路,電流上升。
當1和4同時變為低電平,2和3相應變為高電平,因為楞次定律,線圈上的電流方向不變,于是由GND-2-Motor-3-VCC形成通路,雖然存在反向的供電電壓,但是電機的線圈電流更大,于是電流仍然向VCC流動,同時電流下降的更快,線圈電流波動也更大。
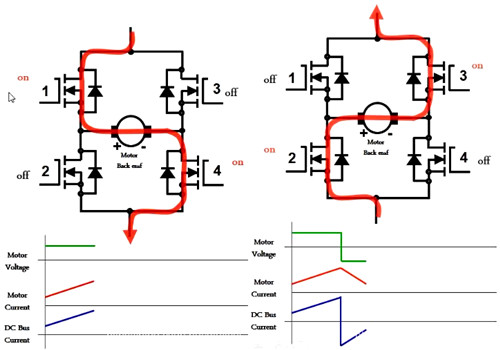
電流波形:
〈烜芯微/XXW〉專業制造二極管,三極管,MOS管,橋堆等,20年,工廠直銷省20%,上萬家電路電器生產企業選用,專業的工程師幫您穩定好每一批產品,如果您有遇到什么需要幫助解決的,可以直接聯系下方的聯系號碼或加QQ/微信,由我們的銷售經理給您精準的報價以及產品介紹
聯系號碼:18923864027(同微信)
QQ:709211280