

步進電機又稱脈沖電機,它是一種感應電機,涉及到機械、電機、電子及計算機等許多專業知識。步進電機作為執行元件,是機電一體化的關鍵產品之一,廣泛應用在各種自動化控制系統中。隨著微電子和計算機技術的發展,步進電機的需求量與日俱增,在各個國民經濟領域都有應用。
什么是步進電機
步進電機是一種將電脈沖轉化為角位移的執行機構。其將電脈沖信號轉變為角位移或線位移,是現代數字程序控制系統中的主要執行元件,應用極為廣泛。
步進電機工作原理
步進電機控制系統由步進電機控制器、步進電機驅動器、步進電機三部分組成,步進電機控制器是指揮中心,它發出信號脈沖給步進電機驅動器,而步進電機驅動器把接收到信號脈沖脈沖轉化為電脈沖,驅動步進電機轉動,控制器每發出一個信號脈沖,步進電機就旋轉一個角度,它的旋轉是以固定的角度一步一步運行的。控制器可以通過控制脈沖數量來控制步進電機的旋轉角度,從而準確定位。通過控制脈沖頻率精確控制步進電機的旋轉速度。
步進電機的結構及工作原理
通常電機的轉子為永磁體,當電流流過定子繞組時,定子繞組產生一矢量磁場。該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度。轉子也隨著該磁場轉一個角度。
每輸入一個電脈沖,電動機轉動一個角度前進一步。它輸出的角位移與輸入的脈沖數成正比、轉速與脈沖頻率成正比。改變繞組通電的順序,電機就會反轉。所以可用控制脈沖數量、頻率及電動機各相繞組的通電順序來控制步進電機的轉動。
我們一般用的步進電機是這樣的:

結構圖一般是這樣的:
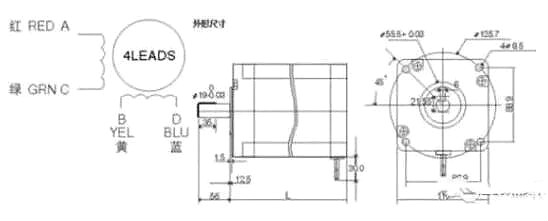
那么這個AC,BD代表什么呢?步進電機又為什么具有以上的那些特點呢?這就要從步進電機的特殊結構說起。先上一個步進電機內部的結構示意圖:
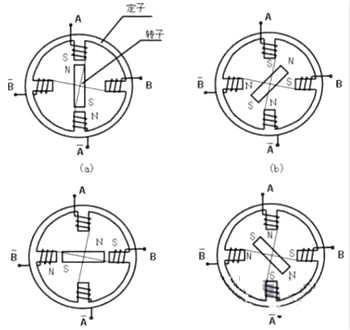
先從這個簡單的圖分析原理,圖中有兩組繞組A A-,B B-,可以看出他們分別形成的磁場是相反的,位置也是相對的。這2組繞組對應真實圖中的AC和BD。
定子為鐵芯,A A-,B B-繞在鐵芯上,通電之后產生磁場變成電磁鐵,轉子為永磁體,磁場將對轉自產生吸引或者排斥。
左上圖A A-吸引轉子,使得轉子豎直(此時只有A A-通電)當B B-也通電后,B B-也產生磁場,此時轉自將像A B中間區域偏轉,具體偏轉角度跟A B上電流大小比例有關。
左下圖此時A A-斷電,B B-繼續通電,則轉子被吸引到水平位置。
右下圖此時A A-反向通電,B B-繼續通電,則轉自順時針旋轉,重復以上過程,則轉子可以進行旋轉運動,并控制通電的時機以及順序,便可以達到控制步進電機旋轉角度。
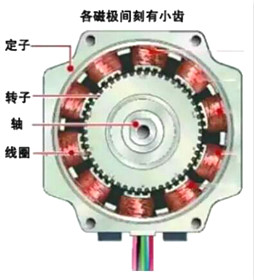
定子鐵心:定子鐵心為凸極結構,由硅鋼片迭壓而成。在面向氣隙的定子鐵心表面有齒距相等的小齒。
定子繞組:定子每極上套有一個集中繞組,相對兩極的繞組串聯構成一相。步進電動機可以做成二相、三相、四相、五相、六相、八相等。
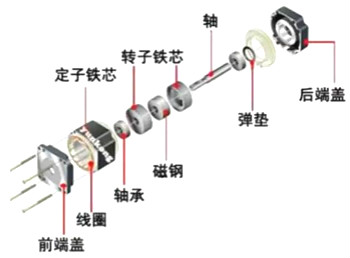
轉子:轉子上只有齒槽沒有繞組,系統工作要求不同,轉子齒數也不同。定轉子齒形相同。
原理
當步進電機切換一次定子繞組的激磁電流時,轉子就旋轉一個固定角度即步距角。步距角一般由切換的相電流產生的旋轉力矩得到,所以需要每相極數是偶數。步進電機通常都為兩相以上的,當然也有一些特殊的只有一個線圈的單相步進電機。雖說單相,實為一個線圈產生的磁通方向交互反轉而驅動轉子轉動。實用的步進電機的相數有單相、兩相、三相、四相、五相。
現在使用的步進電機大部分用永磁轉子。普遍使用永久磁鐵的原因是效率高,分辨率高等優點。以下以介紹永磁轉子為主。
決定步距角的因素
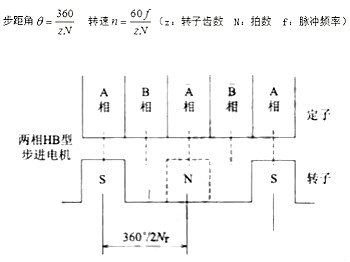
步進電機分辨率(一圈的步數,360°除以步距角)越高,位置精度越高。為了得到高分辨率,設計的極數要多。PM型轉子為N與S極在轉子的鐵心外表面上交互等節距放置,轉子極數為N極與S極數之和,為簡化講解,假設極對數為1。此處確定轉子為永久磁鐵的步進電機的步距角θs由下式表示,其中Nr為轉子極對數,P為定子相數,θs=180°/PNr上式的物理含義如下:
轉子旋轉一周的機械角度為360。,如用極數2Nr去除,相當于一個極所占的機械角度即180°/Nr。這就是說,一個極的機械角度用定子相數去分割就得到步距角,此概念如下圖所示。
由式θs=180°/PNr可知,步距角越小,分辨率越高,因此要提高步進電機的分辨率,就要增加轉子極對數或采用定子相數P較多的多相式方法。而Nr的增加受到機械加工的限制,所以要制造高分辨率的步進電機需要兩種方法并用才行。 公式如下:
驅動器原理
步進電機需要使用專用的步進電機驅動器驅動,驅動器由脈沖發生控制單元、功率驅動單元、保護單元等組成。功率驅動單元將脈沖發生控制單元生成的脈沖放大,與步進電機直接耦合,屬于步進電機與微控制器的功率接口。

控制指令單元,接收脈沖與方向信號,對應的脈沖發生控制單元對應生成一組相應相數的脈沖,經過功率驅動單元后送到步進電機,步進電機在對應方向上轉過一個步距角。 驅動器的脈沖給定方式決定了步進電機運行方式,如下:
(1)m相單m拍運行
(2)m相雙m拍運行
(3)m相單、雙m拍運行
(4)細分驅動,需要驅動器給出不同幅值的驅動信號
步進電機有一些重要的技術數據,如最大靜轉矩、起動頻率、運行頻率等。一般來說步距角越小,電機最大靜轉矩越大,則起動頻率和運行頻率越高,所以運行方式中強調了細分驅動技術,該方式提高了步進電機的轉動力矩和分辨率,完全消除了電機的低頻振蕩。所以細分驅動器驅動性能優與其他類型驅動器。
步進電機的種類
目前常用的有三種步進電機:
(1)反應式步進電機(VR)。反應式步進電機結構簡單,生產成本低,步距角小;但動態性能差。
(2)永磁式步進電機(PM)。永磁式步進電機出力大,動態性能好;但步距角大。
(3)混合式步進電機(HB)。混合式步進電機綜合了反應式、永磁式步進電動機兩者的優點,它的步距角小,出力大,動態性能好,是目前性能最高的步進電動機。它有時也稱作永磁感應子式步進電動機。
反應式步進電機
反應式步進電機(VR),是一種傳統的步進電機,由磁性轉子鐵芯通過與由定子產生的脈沖電磁場相互作用而產生轉動。
反應式步進電機工作原理比較簡單,轉子上均勻分布著很多小齒,定子齒有三個勵磁繞阻,其幾何軸線依次分別與轉子齒軸線錯開。電機的位置和速度由導電次數(脈沖數)和頻率成一一對應關系。而方向由導電順序決定。
永磁步進電機
永磁式步進電機(PM),是由磁性轉子鐵芯通過與由定子產生的脈沖電磁場相互作用而產生轉動的一種設備。
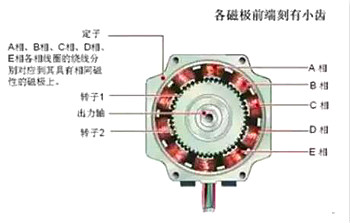
永磁式步進電機一般為兩相,轉矩和體積較小,步進角一般為7.5度或15度,對7.5度步矩而言,典型的極數為24。電機里有轉子和定子兩部分:可以是定子是線圈,轉子是永磁鐵;也可以是定子是永磁鐵,轉子是線圈。
在這種電機里,定子齒或爪極由在定子線圈里流過的電流產生不同極性的磁場。若兩個定子段里的轉子磁化狀態是對齊的,則兩段里的定子齒將錯開l/4齒距。觀看A段里轉子磁極和定子齒的位置關系。因為B段里的定子齒相對A段里的齒錯開l/4齒距,故轉子將在同一方向進一步受到驅動。
比如當電機的轉子為永磁體,電流流過定子繞組時,定子繞組會產生一矢量磁場。磁場就會帶動轉子旋轉一個角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度。
轉子也隨著該磁場轉一個角度。每輸入一個電脈沖,電動機轉動一個角度前進一步。它輸出的角位移與輸入的脈沖數成正比、轉速與脈沖頻率成正比。若改變繞組通電的順序,電機就會反轉。因此可用控制脈沖數量、頻率及電動機各相繞組的通電順序來控制步進電機的轉動。
當電流流過定子繞組時,定子繞組產生一矢量磁場。該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度。轉子也隨著該磁場轉一個角度。每輸入一個電脈沖,電動機轉動一個角度前進一步。它輸出的角位移與輸入的脈沖數成正比、轉速與脈沖頻率成正比。改變繞組通電的順序,電機就會反轉。所以可用控制脈沖數量、頻率及電動機各相繞組的通電順序來控制步進電機的轉動。
混合式步進電機
混合式步進是指混合了永磁式和反應式的優點。它又分為兩相、三相和五相:兩相步進角一般為1.8度而五相步進角一般為 0.72度,混合式步進電機隨著相數(通電繞組數)的增加,步進角減小,精度提高,這種步進電機的應用最為廣泛。
性能:
a. 控制精度:步進電機的相數和拍數越多,它的精確度就越高。
b. 低頻特性:步進電機在低速時易出現低頻振動現象,當它工作在低速時一般采用阻尼技術或細分技術來克服低頻振動現象。
c. 矩頻特性:步進電機輸出力矩隨轉速的升高而下降,高速時會急劇下降。
d. 過載能力:步進電機不具備過載能力。
e. 運行性能:步進電機的控制為開環控制,啟動頻率過高或負載過大易丟步或堵轉的現象,停止時轉速過高易出現過沖現象。
f. 速度響應性能:步進電機從靜止加速到工作轉速需要上百毫秒。
步進電機和伺服電機的區別
上面介紹那么多關于步進電機的知識,大家是不是感覺跟我們前幾期介紹過的伺服電機功能上是否很相似呢,這里小編為您答疑解惑。
步進電機是一種離散運動的裝置,它和現代數字控制技術有著本質的聯系。在目前國內的數字控制系統中,步進電機的應用十分廣泛。隨著全數字式交流伺服系統的出現,交流伺服電機也越來越多地應用于數字控制系統中。
為了適應數字控制的發展趨勢,運動控制系統中大多采用步進電機或全數字式交流伺服電機作為執行電動機。雖然兩者在位置控制方式上十分相似(脈沖串和方向信號),但在使用性能和應用場合上存在著較大的差異。
步進電機的一些應用
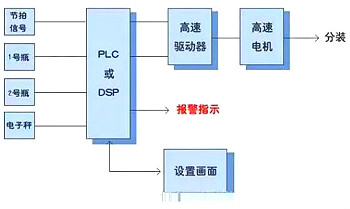
1、包裝機械中的應用
步進電機控制齒輪泵也可以實現精確計量。齒輪泵在輸送粘稠體方面得到了廣泛的應用,例如糖漿、豆沙、白酒、油料、番茄醬等的輸送。
齒輪泵計量是靠一對齒輪嚙合轉動計量的,物料通過齒與齒的空間被強制從進料口送到出料口。動力來自步進電機,步進電機轉動的位置及速度由可編程控制器控制,計量精度高于活塞泵的計量精度。
步進電機適于在低速下運行,當速度加快時,步進電機的噪聲會明顯加大,其它經濟指標會顯著下降。對于轉速比較高的齒輪泵來說,選用升速結構比較好。我們在粘稠體包裝機上開始采用的是步進電機直聯齒輪泵的結構,結果噪聲難以避免,可靠性下降。
后來采用直齒輪升速的辦法,降低了步進電機的速度,噪聲得到了控制,可靠性也有所提高,計量度得到了保證。
在制袋、充填、封口為一體的包裝機中,要求包裝用塑料薄膜定位定長供給,無論間歇供給還是連續供給,都可以用步進電機來可靠完成。采用步進電機與拉帶滾輪直接連接拉帶,不僅結構得到了簡化,而且調節極為方便,只要通過控制面板上的按鈕就可以實現,這樣既節省了調節時間,又節約了包裝材料。
在間歇式包裝機中,包裝材料的供送控制可以采用兩種模式:袋長控制模式和色標控制模式 。袋長控制模式適用于不帶色標的包裝膜,通過預先設定步進電機轉速的方法實現,轉空比的設定通過撥碼開關就可以實現。
步進電機工作原理
色標模式配備有光電開關,光電開關檢測色標的位置,當檢測到色標時,發出控制開關信號,步進電機接到信號后,停止轉動,延時一定時間后,再轉動供膜,周而復始,保證按照色標的位置定長供膜。
橫封輪每轉一周的總時間與橫封所需要的時間都是恒定的,要滿足速度同步的要求,可以將步進電機一周內的轉速分成兩部分,一部分首先滿足速度同步的要求,而另外空載的部分滿足一周總時間的要求。為了實現良好的封口質量,還可以通過步進電機對橫封輪實現非衡速的控制模式,就是在橫封的每一點上都實現速度同步。
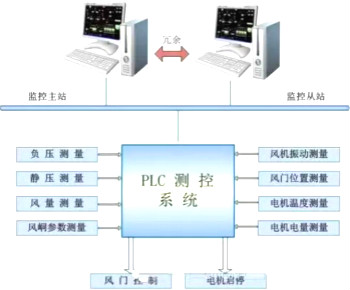
2、礦井提升中的應用
由于步進電機獨特的優點,步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元件。在非超載的情況下。電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號。
電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點。使得在速度、位置等控制領域用步進電機來控制變的非常的簡單。作為一種把數字電脈沖信號轉換成機械角位移的機電元件。
步進電機具有控制簡單,功率大,維護容易,定位精度高,可靠性好,體積小,驕動系統多達32種選擇。并且價格低,無累積位置誤差,可自鎖,控制成本低等特點而得到廣泛應用,再加上利用現在比較成熟的微機技術中單片機的應用控制。可以輕松實現自動控制,以上特點完全符合微拖的要求。并且可以實現礦井提升系統的自動控制,實現無人值守提升系統。
步進電機工作原理
礦井提升中步進電機的控制過程是這樣的,首先提升機減速接近爬行階段,速度降至3m/s左右時。由自動控制系統自動接通電磁閥。電磁閥桿在電磁力的作用下克服閥桿下端彈簧的彈力下移,使壓縮空氣由A腔進入B腔,通過減速器的空心軸進入氣囊離合器。使微拖裝置與主機連接起來。
當速度繼續降至爬行速度時。通過控制電路切斷主電動機動力制動電源,提升機改由步進電機拖動進行平穩的低速爬行。提升容器到達終點,進行卸載時,控制電路使電磁閥斷電,步進電機與主機脫離,完成一次爬行過程,接下來進行下一周期的工作。通過改進,大大提高卸載時事故的發生率,提高煤礦生產的安全,并且為煤礦后來進行自動化生產建立基礎。
3、汽車測試中的應用
許多汽車制動元件的檢測,例如液壓制動系中制動主缸助力器總成的檢測,氣壓制動系中氣制動閥的檢測,在測試系統中需要用到電機推動滾珠絲杠來模擬在實際汽車制動時踩下制動踏板進行制動的過程,滾珠絲杠推動主缸或者制動閥使其達到汽車制動時所需要的各種工作狀態,以便來測試各種性能。
而步進電機由于角位移與輸入脈沖嚴格成正比關系,在其運動過程中沒有累計誤差,跟隨性良好,因此選擇步進電機是汽車制動元件測試系統中性能較好的執行元件。系統硬件組成有位移傳感器,力傳感器,步進電機;控制核心采用工控機和數據采集卡。
步進電機通過聯軸器驅動滾珠絲杠組成加力裝置,力傳感器安裝在絲杠頂桿前端,用于測量步進電機輸出力矩“被測試件輸入力”的大小,數據經由A/D轉換送工控機處理,工控機控制步進電機的啟動、前進、后退、停止,并按測試程序控制前進和后退的速度,同時由位移傳感器測量出步進電機的位移量,并將力和位移的相應數據通過顯示器表示出來,根據相關行業標準來判斷氣制動閥的合格與否。
一般采用軟件延時的方法來對步進電機的運行速度、步數及方向進行控制,根據計算機所發出脈沖的頻率和數量所需的時間來設計一個子程序,該子程序包含一定的指令,設計者通常要對這些指令的執行時間進行嚴密的計算或者精確的測試,以便確定延時時間是否符合要求,每當子程序結束后,可以執行下面的操作。
采用軟件延時方式時,CPU一直被占用,CPU利用率低,這在許多場合是非常不利的。因此需要重新設計對步進電機的控制程序,采用PCL-812PG數據采集卡,利用812PG卡中自帶可編程計數/定時器8254及其他邏輯電路器件設計一種步進電機控制方式,僅需要幾條簡單的指令就可以產生具有一定頻率和數目的脈沖信號。
可編程的硬件定時器直接對系統時鐘脈沖或某一固定頻率的時鐘脈沖進行計數,計數值則由編程決定當計數到預定的脈沖數時,給出定時時間到的信號,得到所需的延時時間或定時間隔,由于計數的初始值由編程決定,因而在不改動硬件的情況下,只通過程序的變化即可滿足不同的定時和計數要求,因此使用很方便。
烜芯微專業制造二三極管,MOS管,20年,工廠直銷省20%,1500家電路電器生產企業選用,專業的工程師幫您穩定好每一批產品,如果您有遇到什么需要幫助解決的,可以點擊右邊的工程師,或者點擊銷售經理給您精準的報價以及產品介紹
烜芯微專業制造二三極管,MOS管,20年,工廠直銷省20%,1500家電路電器生產企業選用,專業的工程師幫您穩定好每一批產品,如果您有遇到什么需要幫助解決的,可以點擊右邊的工程師,或者點擊銷售經理給您精準的報價以及產品介紹