

一、步進電機驅動系統性能
1)系統常識:
步進電機和步進電機驅動器構成步進電機驅動系統。步進電機驅動系統的性能,不但取決于步進電機自身的性能,也取決于步進電機驅動器的優劣。對步進電機驅動器的研究幾乎是與步進電機的研究同步進行的。
2)系統概述:
步進電機是一種將電脈沖轉化為角位移的執行元件。當步進電機驅動器接收到一個脈沖信號(來自控制器),它就驅動步進電機按設定的方向轉動一個固定的角度(稱為“步距角”),它的旋轉是以固定的角度一步一步運行的。
3)系統控制:
步進電機不能直接接到直流或交流電源上工作,必須使用專用的驅動電源(步進電機驅動器)。控制器(脈沖信號發生器)可以通過控制脈沖的個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。
4)用途:
步進電機是一種控制用的特種電機,作為執行元件,是機電一體化的關鍵產品之一,隨著微電子和計算機技術的發展(步進電機驅動器性能提高),步進電機的需求量與日俱增。步進電機在運行中精度沒有積累誤差的特點,使其廣泛應用于各種自動化控制系統,特別是開環控制系統。
二、步進電機結構分類
步進電機也叫脈沖電機,包括反應式步進電機(VR)、永磁式步進電機(PM)、混合式步進電機(HB)等。
1)反應式步進電機:
也叫感應式、磁滯式或磁阻式步進電機。其定子和轉子均由軟磁材料制成,定子上均勻分布的大磁極上裝有多相勵磁繞組,定、轉子周邊均勻分布小齒和 槽,通電后利用磁導的變化產生轉矩。一般為三、四、五、六相;可實現大轉矩輸出(消耗功率較大,電流最高可達20A,驅動電壓較高);步距角小(最小可做 到六分之一度);斷電時無定位轉矩;電機內阻尼較小,單步運行(指脈沖頻率很低時)震蕩時間較長;啟動和運行頻率較高。
2)永磁式步進電機:
通常電機轉子由永磁材料制成,軟磁材料制成的定子上有多相勵磁繞組,定、轉子周邊沒有小齒和槽,通電后利用永磁體與定子電流磁場相互作用產生轉 矩。一般為兩相或四相;輸出轉矩小(消耗功率較小,電流一般小于2A,驅動電壓12V);步距角大(例如7.5度、15度、22.5度等);斷電時具有一 定的保持轉矩;啟動和運行頻率較低。
3)混合式步進電機:
也叫永磁反應式、永磁感應式步進電機,混合了永磁式和反應式的優點。其定子和四相反應式步進電機沒有區別(但同一相的兩個磁極相對,且兩個磁極 上繞組產生的N、S極性必須相同),轉子結構較為復雜(轉子內部為圓柱形永磁鐵,兩端外套軟磁材料,周邊有小齒和槽)。一般為兩相或四相;須供給正負脈沖 信號;輸出轉矩較永磁式大(消耗功率相對較小);步距角較永磁式小(一般為1.8度);斷電時無定位轉矩;啟動和運行頻率較高;是目前發展較快的一種步進 電機。
三、步進電機的基本參數
1)電機固有步距角:
它表示控制系統每發一個步進脈沖信號,電機所轉動的角度。電機出廠時給出了一個步距角的值,如STP-59D5026型電機給出的值為 0.9°/1.8°(表示半步工作時為0.9°、整步工作時為1.8°),這個步距角可以稱之為‘電機固有步距角’,它不一定是電機工作時的實際步距角, 實際步距角和驅動器有關。
2)步進電機的相數:
是指電機內部的線圈組數,目前常用的有二相、三相、四相、五相步進電機。電機相數不同,其步距角也不同,一般二相電機的步距角為 0.9°/1.8°、三相的為0.75°/1.5°、五相的為0.36°/0.72° 。步進電機增加相數能提高性能,但步進電機的結構和驅動電源都會更復雜,成本也會增加。
3)保持轉矩(HOLDING TORQUE):
也叫最大靜轉矩,是在額定靜態電流下施加在已通電的步進電機轉軸上而不產生連續旋轉的最大轉矩。它是步進電機最重要的參數之一,通常步進電機在 低速時的力矩接近保持轉矩。由于步進電機的輸出力矩隨速度的增大而不斷衰減,輸出功率也隨速度的增大而變化,所以保持轉矩就成為了衡量步進電機最重要的參 數之一。比如,當人們說2N.m的步進電機,在沒有特殊說明的情況下是指保持轉矩為2N.m的步進電機。
4)步距精度:
可以用定位誤差來表示,也可以用步距角誤差來表示。
5)矩角特性:
步進電機的轉子離開平衡位置后所具有的恢復轉矩,隨著轉角的偏移而變化。步進電機靜轉矩與失調角的關系稱為矩角特性。
6)靜態溫升:
指電機靜止不動時,按規定的運行方式中最多的相數通以額定靜態電流,達到穩定的熱平衡狀態時的溫升。
7)動態溫升:
電機在某一頻率下空載運行,按規定的運行時間進行工作,運行時間結束后電機所達到的溫升叫動態溫升。
8)轉矩特性:
它表示電機轉矩和單相通電時勵磁電流的關系。
9)啟動矩頻特性:
啟動頻率與負載轉矩的關系稱為啟動矩頻特性。
10)運行矩頻特性/慣頻特性:略
11)升降頻時間:
指電機從啟動頻率升到最高運行頻率或從最高運行頻率降到啟動頻率所需的時間。
12)DETENT TORQUE:
是指步進電機沒有通電的情況下,定子鎖住轉子的力矩。DETENT TORQUE 在國內沒有統一的翻譯方式,容易產生誤解;反應式步進電機的轉子不是永磁材料,所以它沒有DETENT TORQUE。
四、步進電機特點
(1)步進電機沒有積累誤差:一般步進電機的精度為實際步距角的百分之三到五,且不累積。
(2)步進電機在工作時,脈沖信號按一定順序輪流加到各相繞組上(由驅動器內的環形分配器控制繞組通斷電的方式)。
(3)即使是同一臺步進電機,在使用不同驅動方案時,其矩頻特性也相差很大。
(4)步進電機與其它電動機不同,其標稱額定電壓和額定電流只是參考值;又因為步進電機是以脈沖方式供電,電源電壓是其最高電壓,而不是平均電壓,所以,步進電機可以超出其額定值范圍工作。但選擇時不應偏離額定值太遠。
(5)步進電機外表允許的最高溫度: 步進電機溫度過高首先會使電機的磁性材料退磁,從而導致力矩下降乃至于失步,因此電機外表允許的最高溫度應取決于不同電機磁性材料的退磁點;一般來講,磁 性材料的退磁點都在攝氏130度以上,有的甚至高達攝氏200度以上,所以步進電機外表溫度在攝氏80-90度完全正常。
(6)步進電機的力矩會隨轉速的升高而下降:當步進電機轉動時,電機各相繞組的電感將形成一個反向電動勢;頻率越高,反向電動勢越大。在它的作用下,電機隨頻率(或速度)的增大而相電流減小,從而導致力矩下降。
(7)步進電機低速時可以正常運轉,但若高于一定頻率就無法啟動,并伴有嘯叫聲。
步進電機有一個技術參數:空載啟動頻率,即步進電機在空載情況下能夠正常啟動的脈沖頻率,如果脈沖頻率高于該值,電機不能正常啟動,可能發生丟 步或堵轉。在有負載的情況下,啟動頻率應更低。如果要使電機達到高速轉動,脈沖頻率應該有加速過程,即啟動頻率較低,然后按一定加速度升到所希望的高頻 (電機轉速從低速升到高速)。
(8)四相混合式步進電機一般由兩相驅動器來驅動,因此,連接時可以采用串聯接法或并聯接法將四相電機接成兩相使用。串聯接法一般在電機轉速較 低的場合使用,此時需要的驅動器輸出電流為電機相電流的0.7倍,因而電機發熱小;并聯接法一般在電機轉速較高的場合使用(又稱高速接法),所需要的驅動 器輸出電流為電機相電流的1.4倍,因而電機發熱較大。
(9)混合式步進電機驅動器的供電電源電壓一般是一個較寬的范圍 (比如IM483的供電電壓為12~48VDC),電源電壓通常根據電機的工作轉速和響應要求來選擇。如果電機工作轉速較高或響應要求較快,那么電壓取值 也高,但注意電源電壓的紋波不能超過驅動器的最大輸入電壓,否則可能損壞驅動器。
(10)供電電源電流一般根據驅動器的輸出相電流I來確定。如果采用線性電源,電源電流一般可取I 的1.1~1.3倍;如果采用開關電源,電源電流一般可取I 的1.5~2.0倍。
(11)當脫機信號FREE為低電平時,驅動器輸出到電機的電流被切斷,電機轉子處于自由狀態(脫機狀態)。在有些自動化設備中,如果在驅動器 不斷電的情況下要求直接轉動電機軸(手動方式),就可以將FREE信號置低,使電機脫機,進行手動操作或調節。手動完成后,再將FREE信號置高,以繼續 自動控制。
(12)用簡單的方法調整兩相步進電機通電后的轉動方向,只需將電機與驅動器接線的A+和A-(或者B+和B-)對調即可。
五、步進電機驅動器的原理
步進電機的運行要有一電子裝置進行驅動,這種裝置就是步進電機驅動器,它是把控制系統發出的脈沖信號,加以放大以驅動步進電機。步進電機的轉速與脈沖信號的頻率成正比,控制步進脈沖信號的頻率,可以對電機精確調速;控制步進脈沖的個數,可以對電機精確定位。
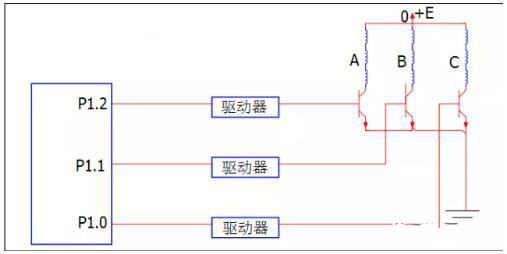
典型的步進電機驅動控制系統主要由三部分組成:
1)步進控制器,由單片機實現。
2)驅動器,把單片機輸出的脈沖加以放大,以驅動步進電機。
3)步進電機。
典型的步進電機驅動控制電路圖如下:
六、步進電機的選擇
1)首先選擇類型,其次是具體的品種與型號。
2)反應式、永磁式和混合式三種步進電機的性能指標、外形尺寸、安裝方法、脈沖電源種類和控制電路等都不同,價格差異也很大,選擇時應綜合考慮。
3)具有控制集成電路的步進電機應優先考慮。
七、步進電機工作方式分類:可分為功率式和伺服式兩種
1)功率式:輸出轉矩較大,能直接帶動較大負載(一般使用反應式、混合式步進電機)。
2)伺服式:輸出轉矩較小,只能帶動較小負載(一般使用永磁式、混合式步進電機)。
八、PWM調速的電機驅動電路,主要有以下性能指標
1)輸出電流和電壓范圍,它決定著電路能驅動多大功率的電機。
2)效率,高的效率不僅意味著節省電源,也會減少驅動電路的發熱。要提高電路的效率,可以從保證功率器件的開關工作狀態和防止共態導通(H橋或推挽電路可能出現的一個問題,即兩個功率器件同時導通使電源短路)入手。
3)對控制輸入端的影響。功率電路對其輸入端應有良好的信號隔離,防止有高電壓大電流進入主控電路,這可以用高的輸入阻抗或者光電耦合器實現隔離。
4)對電源的影響。共態導通可以引起電源電壓的瞬間下降造成高頻電源污染;大的電流可能導致地線電位浮動。
5)可靠性。電機驅動電路應該盡可能做到,無論加上何種控制信號,何種無源負載,電路都是安全的。
烜芯微專業制造二三極管,MOS管,20年,工廠直銷省20%,1500家電路電器生產企業選用,專業的工程師幫您穩定好每一批產品,如果您有遇到什么需要幫助解決的,可以點擊右邊的工程師,或者點擊銷售經理給您精準的報價以及產品介紹
烜芯微專業制造二三極管,MOS管,20年,工廠直銷省20%,1500家電路電器生產企業選用,專業的工程師幫您穩定好每一批產品,如果您有遇到什么需要幫助解決的,可以點擊右邊的工程師,或者點擊銷售經理給您精準的報價以及產品介紹