

一、步進(jìn)電機(jī)驅(qū)動電路
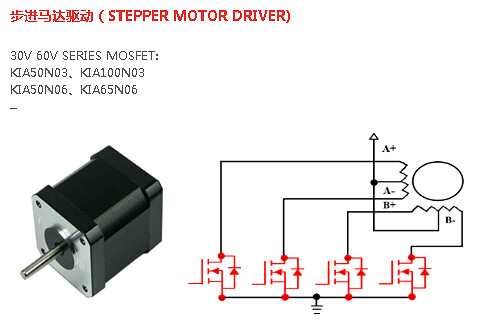
在H橋電路的基礎(chǔ)上設(shè)計步進(jìn)電機(jī)驅(qū)動電路。采用分立元件MOS管搭建雙H橋驅(qū)動電路是成熟的電機(jī)控制方案,電路不復(fù)雜,性能可靠,根據(jù)MOS管的不同工作電流的上限甚至可以高達(dá)數(shù)十安培,是理想的步進(jìn)電機(jī)驅(qū)動器方案。MOS管H橋驅(qū)動電路有NMOS構(gòu)型和PMOS+NMOS構(gòu)型,全NMOS管H橋?qū)娮韪。蠘虮鄣腘MOS管的導(dǎo)通電壓高于電源電壓,需要額外的升壓電路,這樣增加了電路的復(fù)雜程度和成本,我們采用PMOS+NMOS構(gòu)型方式搭建雙H橋步進(jìn)電機(jī)驅(qū)動電路,電路更簡潔,成本更低;且在這樣的小電流工作場合,PMOS所增加的導(dǎo)通損耗可以忽略不計。驅(qū)動電路與MCU之間進(jìn)行光電隔離,選用廣泛使用的低成本光耦PC817。加入雙輸入四通道與門(74HC08D),為驅(qū)動電路添加使能的功能,即只有在使能的前提下,四路控制信號才是有效的,使步進(jìn)電機(jī)運(yùn)行更安全穩(wěn)定MOS管選用IRF5305和IRF1205,其參數(shù)為55V、110A,TO252貼片封裝。步進(jìn)電機(jī)驅(qū)動電路原理圖如圖所示。
二、電機(jī)參數(shù)測量電路
為了實時監(jiān)測步進(jìn)電機(jī)的運(yùn)行狀態(tài)是否正常,為驅(qū)動器設(shè)計了電機(jī)參數(shù)測量功能、通過實時監(jiān)測電機(jī)的工作電壓、工作相電流和機(jī)殼溫度來實時獲取電機(jī)的運(yùn)行參數(shù),保證電機(jī)運(yùn)行安全穩(wěn)定。
電機(jī)電流采樣電阻選用康銅電阻,一端連接H橋下方,另一端接GND,其工作溫度范圍寬,溫度系數(shù)僅為-40~40*10-6/℃,是高精度電流采樣電阻的理想選擇。電壓電流信號調(diào)理電路采用LM324運(yùn)放搭建,電壓跟隨后送入MCU,由MCU內(nèi)置10Bit A/D轉(zhuǎn)換器進(jìn)行A/D采樣。機(jī)殼溫度監(jiān)測選用數(shù)字溫芯片DS18B20,將其貼至電機(jī)外殼表面,實時監(jiān)測溫度參數(shù)并送入MCU。電機(jī)參數(shù)檢測電路原理圖如圖所示。在進(jìn)行電路設(shè)計時,使用0歐姆電阻將模擬地(AGND)和數(shù)字地(GND)單點(diǎn)連接,以降低相互干擾,提高電路性能。
三、電源及MCU控制電路
系統(tǒng)中,驅(qū)動電路用輸入電壓供電,MCU和藍(lán)牙模塊需要額外的3.3V電壓供電,傳統(tǒng)的線性穩(wěn)壓器效率低、尺寸大且發(fā)熱嚴(yán)重,因此使用DC-DC開關(guān)電源方式提供3.3V電壓。開關(guān)穩(wěn)壓芯片選用MPS公司MP2359方案,其效率可高至92%、工作頻率高達(dá)1.4MHZ,極高的工作頻率決定其只需要小容量的輸入電容、輸出電容和功率電感即可正常工作。藍(lán)牙選用HC- 05模塊 ,串口自動發(fā)送。主控芯片為PIC24FJ64GA004,電源及主控芯片外圍電路如圖。
四、應(yīng)用設(shè)置
1、設(shè)置步進(jìn)驅(qū)動器的細(xì)分?jǐn)?shù),通常細(xì)分?jǐn)?shù)越高,控制分辨率越高。但細(xì)分?jǐn)?shù)太高則影響到最大進(jìn)給速度。一般來說,對于模具機(jī)用戶可考慮脈沖當(dāng)量為0.001mm/P(此時最大進(jìn)給速度為9600mm/min)或者0.0005mm/P(此時最大進(jìn)給速度為4800mm/min);對于精度要求不高的用戶,脈沖當(dāng)量可設(shè)置的大一些,如0.002mm/P(此時最大進(jìn)給速度為19200mm/min)或0.005mm/P(此時最大進(jìn)給速度為48000mm/min)。對于兩相步進(jìn)電機(jī),脈沖當(dāng)量計算方法如下:脈沖當(dāng)量=絲杠螺距÷細(xì)分?jǐn)?shù)÷200。
2、起跳速度:該參數(shù)對應(yīng)步進(jìn)電機(jī)的起跳頻率。所謂起跳頻率是步進(jìn)電機(jī)不經(jīng)過加速,能夠直接啟動工作的最高頻率。合理地選取該參數(shù)能夠提高加工效率,并且能避開步進(jìn)電機(jī)運(yùn)動特性不好的低速段;但是如果該參數(shù)選取大了,就會造成悶車,所以一定要留有余量。在電機(jī)的出廠參數(shù)中,一般包含起跳頻率參數(shù)。但是在機(jī)床裝配好后,該值可能發(fā)生變化,一般要下降,特別是在做帶負(fù)載運(yùn)動時。所以,該設(shè)定參數(shù)最好是在參考電機(jī)出廠參數(shù)后,再實際測量決定。
3、單軸加速度:用以描述單個進(jìn)給軸的加減速能力,單位是毫米/秒平方。這個指標(biāo)由機(jī)床的物理特性決定,如運(yùn)動部分的質(zhì)量、進(jìn)給電機(jī)的扭矩、阻力、切削負(fù)載等。這個值越大,在運(yùn)動過程中花在加減速過程中的時間越小,效率越高。通常,對于步進(jìn)電機(jī),該值在100 ~ 500之間,對于伺服電機(jī)系統(tǒng),可以設(shè)置在400 ~ 1200之間。在設(shè)置過程中,開始設(shè)置小一點(diǎn),運(yùn)行一段時間,重復(fù)做各種典型運(yùn)動,注意觀察,如果沒有異常情況,然后逐步增加。如果發(fā)現(xiàn)異常情況,則降低該值,并留50%~100%的保險余量。
4、彎道加速度:用以描述多個進(jìn)給軸聯(lián)動時的加減速能力,單位是毫米/秒平方。它決定了機(jī)床在做圓弧運(yùn)動時的最高速度。這個值越大,機(jī)床在做圓弧運(yùn)動時的最大允許速度越大。通常,對于步進(jìn)電機(jī)系統(tǒng)組成的機(jī)床,該值在400~1000之間,對于伺服電機(jī)系統(tǒng),可以設(shè)置在1000 ~ 5000之間。如果是重型機(jī)床,該值要小一些。在設(shè)置過程中,開始設(shè)置小一點(diǎn),運(yùn)行一段時間,重復(fù)做各種典型聯(lián)動運(yùn)動,注意觀察,如果沒有異常情況,然后逐步增加。如果發(fā)現(xiàn)異常情況,則降低該值,并留50%~100%的保險余量。
通常考慮到步進(jìn)電機(jī)的驅(qū)動能力、機(jī)械裝配的摩擦、機(jī)械部件的承受能力,可以在廠商參數(shù)中修改各個軸的最大速度,對機(jī)床用戶實際使用時的三個軸最大速度予以限制,。
5、根據(jù)三個軸零點(diǎn)傳感器的安裝位置,設(shè)置廠商參數(shù)中的回機(jī)械原點(diǎn)參數(shù)。當(dāng)設(shè)置正確后,可運(yùn)行"操作"菜單中的"回機(jī)械原點(diǎn)"。先單軸回,如果運(yùn)動方向正確則繼續(xù)回,否則需停止,重新設(shè)置設(shè)置廠商參數(shù)中的回機(jī)械原點(diǎn)方向,直至所有軸都可回機(jī)械原點(diǎn)。
6、設(shè)置自動加油參數(shù)(設(shè)置得小一些,如5秒加一次油),觀察自動加油是否正確,如果正確,則將自動加油參數(shù)設(shè)置到實際需要的參數(shù)。
7、校驗電子齒輪和脈沖當(dāng)量的設(shè)定值是否匹配。可以在機(jī)床的任意一根軸上做個標(biāo)記,在軟件中把該點(diǎn)坐標(biāo)設(shè)為工作零點(diǎn),用直接輸入指令、點(diǎn)動或手輪等工作方式使該軸走固定距離,用游標(biāo)卡尺測量實際距離與軟件中坐標(biāo)顯示距離是否相附。
8、測定有無丟脈沖。您可以用直觀的方法:用一把尖刀在工件毛坯上點(diǎn)一個點(diǎn),把該點(diǎn)設(shè)為工作原點(diǎn),抬高Z軸,然后把Z軸坐標(biāo)設(shè)為0;反復(fù)使機(jī)床運(yùn)動,比如空刀跑一個典型的加工程序(最好包含三軸聯(lián)動),可在加工中暫停或停止,然后回工件原點(diǎn),緩慢下降Z軸,看刀尖與毛坯上的點(diǎn)是否吻合。如有偏差,請檢查步進(jìn)驅(qū)動器接收脈沖信號的類型,檢查端子板與驅(qū)動器間接線是否有誤。如果還出現(xiàn)悶車或丟步,按10、11、12步調(diào)整加速度等參數(shù)。
五、步進(jìn)電機(jī)概述
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進(jìn)電機(jī)供電,步進(jìn)電機(jī)才能正常工作,驅(qū)動器就是為步進(jìn)電機(jī)分時供電的,多相時序控制器
雖然步進(jìn)電機(jī)已被廣泛地應(yīng)用,但步進(jìn)電機(jī)并不能像普通的直流電機(jī),交流電機(jī)在常規(guī)下使用。它必須由雙環(huán)形脈沖信號、功率驅(qū)動電路等組成控制系統(tǒng)方可使用。因此用好步進(jìn)電機(jī)卻非易事,它涉及到機(jī)械、電機(jī)、電子及計算機(jī)等許多專業(yè)知識。
步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一, 廣泛應(yīng)用在各種自動化控制系統(tǒng)中。隨著微電子和計算機(jī)技術(shù)的發(fā)展,步進(jìn)電機(jī)的需求量與日俱增,在各個國民經(jīng)濟(jì)領(lǐng)域都有應(yīng)用。
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。通俗一點(diǎn)講:當(dāng)步進(jìn)驅(qū)動器接收到一個脈沖信號,它就驅(qū) 動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個固定的角度(即步進(jìn)角)。您可以通過控制脈沖個數(shù)來控制角位移量,從而達(dá)到準(zhǔn)確定位的目的;同時您可以通過控制脈沖頻率來 控制電機(jī)轉(zhuǎn)動的速度和加速度,從而達(dá)到調(diào)速的目的。
六、步進(jìn)電機(jī)的主要特點(diǎn)
1)一般步進(jìn)電機(jī)的精度為步進(jìn)角的3-5%,且不累積。
2)步進(jìn)電機(jī)外表允許的最高溫度。
步進(jìn)電機(jī)溫度過高首先會使電機(jī)的磁性材料退磁,從而導(dǎo)致力矩下降乃至 于失步,因此電機(jī)外表允許的最高溫度應(yīng)取決于不同電機(jī)磁性材料的退磁點(diǎn);一般來講,磁性材料的退磁點(diǎn)都在攝氏130度以上,有的甚至高達(dá)攝氏200度以 上,所以步進(jìn)電機(jī)外表溫度在攝氏80-90度完全正常。
3)步進(jìn)電機(jī)的力矩會隨轉(zhuǎn)速的升高而下降。
步進(jìn)電機(jī)轉(zhuǎn)動時,電機(jī)各相繞組的電感將形成一個反向電動勢;頻率越高,反向電動勢越大。在它的作用下,電機(jī)隨頻率(或速度)的增大而相電流減小,從而導(dǎo)致力矩下降。
4)步進(jìn)電機(jī)低速時可以正常運(yùn)轉(zhuǎn),但若高于一定速度就無法啟動,并伴有嘯叫聲。
步進(jìn)電機(jī)有一個技術(shù)參數(shù):空載啟動頻率,即步進(jìn)電機(jī)在空載情況下能夠 正常啟動的脈沖頻率,如果脈沖頻率高于該值,電機(jī)不能正常啟動,可能發(fā)生丟步或堵轉(zhuǎn)。在有負(fù)載的情況下,啟動頻率應(yīng)更低。如果要使電機(jī)達(dá)到高速轉(zhuǎn)動,脈沖 頻率應(yīng)該有加速過程,即啟動頻率較低,然后按一定加速度升到所希望的高頻(電機(jī)轉(zhuǎn)速從低速升到高速)。
5 )步進(jìn)電機(jī)必須加驅(qū)動才可以運(yùn)轉(zhuǎn), 驅(qū)動信號必須為脈沖信號,沒有脈沖的時候, 步進(jìn)電機(jī)靜止, 如果加入適當(dāng)?shù)拿}沖信號,就會以一定的角度(稱為步角)轉(zhuǎn)動。轉(zhuǎn)動的速度和脈沖的頻率成正比。
6)三相步進(jìn)電機(jī)的步進(jìn)角度為7.5 度,一圈360度, 需要48個脈沖完成。
7)步進(jìn)電機(jī)具有瞬間啟動和急速停止的優(yōu)越特性。
8)改變脈沖的順序,可以方便的改變轉(zhuǎn)動的方向。因此,目前打印機(jī),繪圖儀,機(jī)器人,等等設(shè)備都以步進(jìn)電機(jī)為動力核心。
七、步進(jìn)電機(jī)驅(qū)動器的特點(diǎn)
1)構(gòu)成步進(jìn)電機(jī)驅(qū)動器系統(tǒng)的專用集成電路:
A、脈沖分配器集成電路:如三洋公司的PMM8713、PMM8723、PMM8714等。
B、包含脈沖分配器和電流斬波的控制器集成電路:如SGS公司的L297、L6506等。
C、只含功率驅(qū)動(或包含電流控制、保護(hù)電路)的驅(qū)動器集成電路:如日本新電元工業(yè)公司的MTD1110(四相斬波驅(qū)動)和MTD2001(兩相、H橋、斬波驅(qū)動)。
D、將脈沖分配器、功率驅(qū)動、電流控制和保護(hù)電路都包括在內(nèi)的驅(qū)動控制器集成電路,如東芝公司的TB6560AHQ、MOTOROLA公司的SAA1042(四相)和ALLEGRO公司的UCN5804(四相)等。
2)“細(xì)分驅(qū)動”概述:將“電機(jī)固有步距角”細(xì)分成若干小步的驅(qū)動方法,稱為細(xì)分驅(qū)動,細(xì)分是通過驅(qū)動器精確控制步進(jìn)電機(jī)的相電流實現(xiàn)的,與電機(jī)本 身無關(guān)。其原理是,讓定子通電相電流并不一次升到位,而斷電相電流并不一次降為0(繞組電流波形不再是近似方波,而是N級近似階梯波),則定子繞組電流所 產(chǎn)生的磁場合力,會使轉(zhuǎn)子有N個新的平衡位置(形成N個步距角)。
八、步進(jìn)電機(jī)分類
步進(jìn)電機(jī)分三種:永磁式(PM) 、反應(yīng)式(VR)和混合式(HB)。永磁式步進(jìn)一般為兩相,轉(zhuǎn)矩和體積較小,步進(jìn)角一般為7.5度或15度;反應(yīng)式步進(jìn)一般為三相,可實現(xiàn)大轉(zhuǎn)矩輸出,步進(jìn)角一般為1.5度,但噪聲和振動都很大,在歐美等發(fā)達(dá)國家80年代已被淘汰;混合式步進(jìn)是指混合了永磁式和反應(yīng)式的優(yōu)點(diǎn),分為兩相和五相,兩相步進(jìn)角一 般為1.8度而五相步進(jìn)角一般為 0.72度,這種步進(jìn)電機(jī)的應(yīng)用最為廣泛。
1)、步進(jìn)電機(jī)的優(yōu)缺點(diǎn)
1. 電機(jī)旋轉(zhuǎn)的角度正比于脈沖數(shù);
2. 電機(jī)停轉(zhuǎn)的時候具有最大的轉(zhuǎn)矩(當(dāng)繞組激磁時);
3. 由于每步的精度在百分之三到百分之五,而且不會將一步的誤差積累到下一步因而有較好的位置精度和運(yùn)動的重復(fù)性;
4. 優(yōu)秀的起停和反轉(zhuǎn)響應(yīng);
5. 由于沒有電刷,可靠性較高,因此電機(jī)的壽命僅僅取決于軸承的壽命;
6. 電機(jī)的響應(yīng)僅由數(shù)字輸入脈沖確定,因而可以采用開環(huán)控制,這使得電機(jī)的結(jié)構(gòu)可以比較簡單而且控制成本;
7. 僅僅將負(fù)載直接連接到電機(jī)的轉(zhuǎn)軸上也可以極低速的同步旋轉(zhuǎn)。
8. 由于速度正比于脈沖頻率,因而有比較寬的轉(zhuǎn)速范圍。
九、步進(jìn)電機(jī)的故障診斷與分析處理
(1)常見故障原因
1)驅(qū)動步進(jìn)電機(jī)的脈沖頻率太高,使步進(jìn)電動機(jī)不能響應(yīng),發(fā)生失步或堵轉(zhuǎn)。
2)驅(qū)動電源不佳而造成步進(jìn)電機(jī)失步。
3)步進(jìn)電機(jī)控制及驅(qū)動電路常見的故障有停轉(zhuǎn)、擺動和不能緊鎖。
4)工作臺負(fù)載過重能造成步進(jìn)電機(jī)失步甚至停轉(zhuǎn)。
5)步進(jìn)電機(jī)本身問題或繞組燒壞造成失步或停轉(zhuǎn)。
(2)典型故障分析與處理
起動和運(yùn)行速度慢,影響系統(tǒng)同步
1)步進(jìn)電動機(jī)檢修時,常要將定子各相控制繞組中串聯(lián)的小電阻摘下,進(jìn)行繞組檢測和修理,檢修后未再接入串聯(lián)電阻,有時小電阻損壞或失效未更換,造成難起動,運(yùn)行速度減慢。小電阻失效或未接入,則回路時間常數(shù)加大,使脈沖電流上升沿和下降沿由陡變?yōu)槠教?惡化了頻率特性,也即惡化了步進(jìn)電動機(jī)運(yùn)行特性。所以,當(dāng)步進(jìn)電動機(jī)修完后,一定要接入小電阻;檢修過程也必須用萬用表檢測小電阻有無斷路、短路或擊穿故障,如有則應(yīng)同時更換合格的同規(guī)格小電阻,不要使之失效仍接入線路,不然影響抑制繞組中電感,使系統(tǒng)不同步,又為查找故障增加麻煩。
2)定轉(zhuǎn)子氣隙不均,使定轉(zhuǎn)子相擦,造成起動困難或運(yùn)行速度減慢。由于氣隙不均造成定轉(zhuǎn)子相擦,加大了步進(jìn)電動機(jī)靜態(tài)力矩,阻力加大使動態(tài)特性變壞,導(dǎo)致起動和運(yùn)行速度減慢。當(dāng)發(fā)生此類故障時,應(yīng)仔細(xì)檢查定轉(zhuǎn)子相擦的原因。根據(jù)造成的具體原因,采取有效措施,排除故障,使氣隙均勻。
①檢查中如發(fā)現(xiàn)因軸承損壞或端蓋止口與定子外殼不同心所至,應(yīng)更換新的合格軸承,及新配端蓋,新端蓋止口車削要按外殼止口公差尺寸配車。
②如檢查出屬轉(zhuǎn)軸變彎,可采取調(diào)直方法調(diào)直彎曲端或更換新軸。
③測量轉(zhuǎn)子外徑如發(fā)現(xiàn)橢圓度超差,將轉(zhuǎn)子進(jìn)行精車一刀或磨削加工,消除不圓度。應(yīng)注意車削或磨削加工時,加工量不宜過大,僅需將橢圓大直徑車去或磨去,否則氣隙加大,會導(dǎo)致電機(jī)其它性能變壞。
(2)步進(jìn)電動機(jī)運(yùn)行中失步
當(dāng)步進(jìn)電動機(jī)改變負(fù)載運(yùn)行時,如帶大慣量負(fù)載則產(chǎn)生振蕩,造成電機(jī)在某一運(yùn)行頻率下,起動丟步或停轉(zhuǎn)滑步。造成步進(jìn)電動機(jī)運(yùn)行中失步。為了消除大慣性負(fù)載引起失步,可以采用機(jī)械阻尼的方法,用以消除或吸收振蕩能量;也可以通過加大負(fù)載的摩擦力矩的方法,從而改善運(yùn)行特性,消除失步。因為步進(jìn)電動機(jī)受控于電脈沖而產(chǎn)生步進(jìn)運(yùn)動,采取如上措施能使電脈沖正常,不受干擾,從而消除電機(jī)運(yùn)行中失步。
另一種失步可能是原采用雙電源供電的而改為單電源供電,又未采取相應(yīng)補(bǔ)救措施,使起動頻率和運(yùn)行頻率降低,矩頻特性惡化而失步。當(dāng)是此種原因所至,應(yīng)重新恢復(fù)雙電源供電。有些使用單位或部門,為簡化電路采用單電源供電造成電動機(jī)運(yùn)行失步,這種做法不當(dāng),要知道采用雙電源是為了提高起動和運(yùn)行兩種頻率,改善矩頻特性,從而改善了輸入步進(jìn)電動機(jī)繞組中脈沖電流的上升沿和下降沿。用單電源供電,脈沖穩(wěn)定電流得不到維持,步進(jìn)電動機(jī)功率相應(yīng)減小,所以在驅(qū)動中相當(dāng)于容量減小而過載,效率降低而失步。采用雙電源,用高低兩套電路,即在步進(jìn)電動機(jī)繞組脈沖電流通入瞬間,對其施以高壓,強(qiáng)迫電流上升加速;池電流達(dá)到一定值后,再改施以低壓,使電機(jī)正常運(yùn)行。這種措施不僅使驅(qū)動電源容量大大減小,同時也提高了運(yùn)行效率,改善運(yùn)行特性,電動機(jī)不會失步運(yùn)行。
(3)、控制繞組一相反繞,影響正常運(yùn)行
當(dāng)步進(jìn)電動機(jī)不能正常運(yùn)行時,除上述兩種原因影響速度或失步外,可能是定了控制繞組有一相反接。當(dāng)一相繞組反接,相當(dāng)于通電電流方向相反,電流相互抵消,電動機(jī)在此相內(nèi)無脈沖電流,運(yùn)行失常或根本不能運(yùn)行。在通電情況下,檢測三相電流就能發(fā)現(xiàn)。檢測出反接相后,將該相繞組首末引出線對調(diào),按正確接法接好,再通電運(yùn)行進(jìn)行電流的檢測。
(4)、開路故障
定子控制繞組開路故障,表現(xiàn)為一種是引線接頭處斷或焊接處全脫焊,或從某一匝中導(dǎo)線折斷;另一種情況是導(dǎo)線將斷未斷,如假焊、虛焊,或有裂紋。
此故障可采用檢測普通三相電動機(jī)斷路方法來檢測,較方便的是用萬用表電阻檔來檢測,當(dāng)指針不動或電阻很大,說明所檢測一相繞組為開路。
修理方法是找到故障處,將斷開兩頭漆皮刮掉后擰緊再焊牢,包上絕緣。
(5)、短路故障
步進(jìn)電動機(jī)定子控制繞組一般為單根導(dǎo)線繞制的多匝繞組,短路也是匝間短路。檢測方法主要分以下兩步:
目測法:凡短路的繞組因短路電流大而過熱,繞組導(dǎo)線絕緣層有發(fā)黑變脆的糊焦?fàn)?凡有此種情況的為故障相;
用在通電運(yùn)行狀況下,測量各相電流,凡電流大的相為故障相。
故障相找到后,如果短路在端部外層,采用加熱繞組后,輕輕撬起短路匝,用薄絕緣紙墊好,再壓實,線圈局部加熱,再刷上1032號絕緣漆后烘于即可;如短路嚴(yán)重不能局部修理,只有重繞線圈換上。
(6)、擊穿故障
擊穿故障的繞組可目測出,也可用兆歐表搖測其絕緣電阻,一般擊穿后繞組將接地,檢測相絕緣電阻為零者,說明即擊穿又接地。
(7)、電源裝置故障使步進(jìn)電動機(jī)不能運(yùn)行
功率放大失靈,門電路中電子開關(guān)損壞及計數(shù)器失靈是常發(fā)生的。可采用萬用表及示波器等儀表,對照線路逐段檢測。如測出放大程序邏輯部分無信號或信號弱,說明功率驅(qū)動器有毛病,對其應(yīng)進(jìn)一步檢測和排除故障至有正常信號;當(dāng)電子開關(guān)未在起動位置,門電路就開通,說明起動開關(guān)已經(jīng)損壞,只有更換合格的開關(guān);如反饋信號沒有,即反饋沒有電壓值,說明反饋環(huán)節(jié)有故障,應(yīng)檢測脈沖數(shù)選器及整形反相環(huán)節(jié)等,找出毛病調(diào)整至有正常反饋電壓為止。當(dāng)發(fā)現(xiàn)電動機(jī)通電順序不對,不符合設(shè)定順序,說明環(huán)形分配器失靈,因它的級數(shù)應(yīng)等于電動機(jī)的相數(shù),在此情況下,它才按規(guī)定邏輯給電動機(jī)各相繞組依次通電,使之順序轉(zhuǎn)或逆轉(zhuǎn)。總之,對電源裝置應(yīng)經(jīng)常檢測和調(diào)試,防止故障出現(xiàn),影響電動機(jī)正常運(yùn)行。
烜芯微專業(yè)制造二三極管,MOS管,20年,工廠直銷省20%,1500家電路電器生產(chǎn)企業(yè)選用,專業(yè)的工程師幫您穩(wěn)定好每一批產(chǎn)品,如果您有遇到什么需要幫助解決的,可以點(diǎn)擊右邊的工程師,或者點(diǎn)擊銷售經(jīng)理給您精準(zhǔn)的報價以及產(chǎn)品介紹
烜芯微專業(yè)制造二三極管,MOS管,20年,工廠直銷省20%,1500家電路電器生產(chǎn)企業(yè)選用,專業(yè)的工程師幫您穩(wěn)定好每一批產(chǎn)品,如果您有遇到什么需要幫助解決的,可以點(diǎn)擊右邊的工程師,或者點(diǎn)擊銷售經(jīng)理給您精準(zhǔn)的報價以及產(chǎn)品介紹