

以下幾種簡單的技術措施能夠有效進步電路的開關速度,這就是柵極驅動的優化(圖5. 80)。通常狀況下,為了進步電源的應用率,功率開關總是開通的時間遠比關閉的時間要長,縮短關斷時間就顯得尤為迫切,所以柵極驅動的簡單優化也大都是針對進步關斷速度停止的。
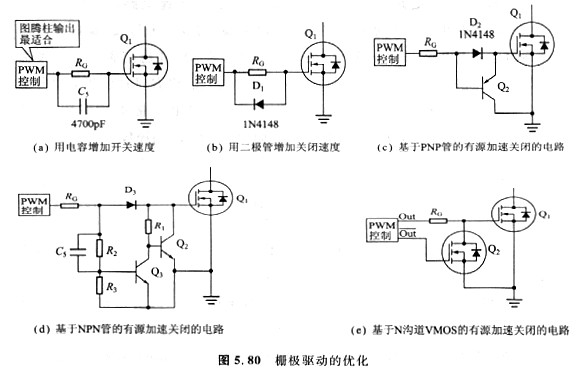
對于高頻信號而言,柵極和源極到驅動控制電路的引線以及RG的寄生電感對開關速度都是有影響的,圖5.80 (a)所示電路使一個小容量的電容與上述寄生電感并聯,相當于對驅動信號停止了相位校正,因而有利于外關速度的進步。
柵極電阻主要用來抑制寄生振蕩,但是會影響開關速度.圖5. 80(b)中的D1在關斷時可以消弭RG帶來的大局部影響,因而可以相對(開通)進步關斷速度。1N4148適用于柵極峰值電流150mA以下的應用,300mA左右時能夠換用BAS40之類的肖特基二極管。
圖5. 80(c)所示電路是目前最為常用的驅動優化電路,特別是關于只要正向驅動信號電平而沒有負向的柵極驅動信號的狀況,這種電路特別有用。PNP晶體管的基極電平低于發射極時導通,反之關斷。因而在VMOS關斷時,Q2會速導通而加速VMOS的關斷,D2則為柵極的正向驅動信號提供通道,也可以維護Q2的基極—發射極不被本人的結電容充放電而擊穿。這種電路采用了有源器件Q2,可以提供比擬大的放電電流通道,還可以短路Q1柵極與源極之間的寄生電感,阻止Q1柵極的泄放能量反應到驅動電路。假如將D2視為一個只要開關功用的NPN晶體管,D2與Q2實踐上構成了一個“圖騰柱”電路,其優勢就不用贅言了吧。這種電路的缺乏之處是,Q1的柵極與源極間的電壓并不能被拉低到OV,影響開關速度的進一步進步。
圖5. 80(d)所示電路是采用NPN晶體管的關斷加速電路,Q2與圖5. 80 (c)的Q2的功用相同。由于是NPN管,所以用Q3構成一個與Q1柵極驅動信號反相的自偏置電路,使Q2在Q1關斷時開通。在Q1開通的驅動信號降臨 時,驅動電流同時對C5充電,此時的C5相當于短道路,將R2短路,驅動信號也 同時送到Q3的基極,使Q3導通,將Q2關閉。當C5充電完成時,剛好是Q1開始關斷的開端,Q3關閉,Q2從R1取得偏置而導通,將Q1的柵極與源極近乎短路,加速其關斷的過程。R2為C5放電提供通道,C5放電等候下一個開關周期的到來。Q2在Q1開通期間會耗費驅動電流,在Q1關斷時由于C5的放電又會拖長Ql的關斷延遲時間。不過這種電路的優勢是,在系統上電期間,可以堅持Q1的關斷,這是由于C5的充電時間是固定的,在系統上電期間,由于電源電壓偏低,驅動電壓也偏低,C5的充電時間延長,Q3的導通也會延遲以至會不導通,此時的驅動信號會由于Q2的導通而失效。
當驅動控制電路可以輸出互相反相的兩路驅動信號時,圖5. 80(e)所示電路是更為理想的一種加速電路,Q1是主開關,Q2足加速關斷的VMOS,顯然Q2只需求比擬低的電壓規格即可,它的飽和導通電阻惹起的壓降就簡直能夠疏忽,因而這個電路可以將Q1的柵極拉低至0V。不過,Q2的輸出電容和Q1的輸入電容是并聯的,這顯然會增大Q1的等效輸入電容,拖慢開關速度。
RG對驅動性能的影響,我們曾經屢次描繪過,除此之外,柵極驅動信號對開關速度也有一定的影響(表5.8)。
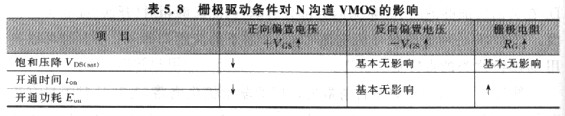
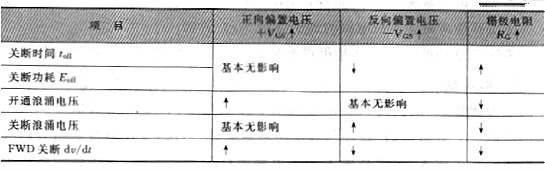
從上表中的內容能夠佐證以下值得我們關注的結論:
(1)本書的第3章曾經指出VGSS遠不止于手冊給出的±20V,停止實踐測定并留有適宜的裕量,選擇比擬高的VGS是利大于弊的。 (2)VGS增加可以增加VMOS的飽和深度,但是大于15V以后,對飽和壓降的影響也是微乎其微的。
(3)反向偏置電壓的絕對值也是越高越有利,普通引薦的數值是—5~—15V,實踐上,假如肯定是平安的,—20V或許更為適宜。 (4)外表上看,RG似乎是取比擬小的值有利,但實踐上減小FWD(續流二極管)關斷時的電壓變化速率dv/dt的問題更為重要,在源極有限流電阻時,還能增加源極限流電阻的反應作用,進步VMOS的穩定性。因而當開關功耗不是主要矛盾時,應該選擇比擬大的RG。因而高壓應用場所就應該選擇比擬大的RG值。
烜芯微專業制造二三極管,MOS管,20年,工廠直銷省20%,1500家電路電器生產企業選用,專業的工程師幫您穩定好每一批產品,如果您有遇到什么需要幫助解決的,可以點擊右邊的工程師,或者點擊銷售經理給您精準的報價以及產品介紹
烜芯微專業制造二三極管,MOS管,20年,工廠直銷省20%,1500家電路電器生產企業選用,專業的工程師幫您穩定好每一批產品,如果您有遇到什么需要幫助解決的,可以點擊右邊的工程師,或者點擊銷售經理給您精準的報價以及產品介紹